About Me

I am a Mechanical Engineer with experience in Robotics, Manufacturing, Mechatronics, and Mechanical Design. I am currently pursuing a MS in Mechanical Engineering with a concentration in Robotics and Controls at Columbia University. I have 3+ years of working experience with:
- Working in team settings with the goal to accomplish task efficiently
- 2D/3D modeling software such as Solidworks and Autodesk
- Managing large scale projects that can exceed +$1,000,000
- Start-up like environments with a lot of responsibilities and duties
- Designing different products from inception to final design
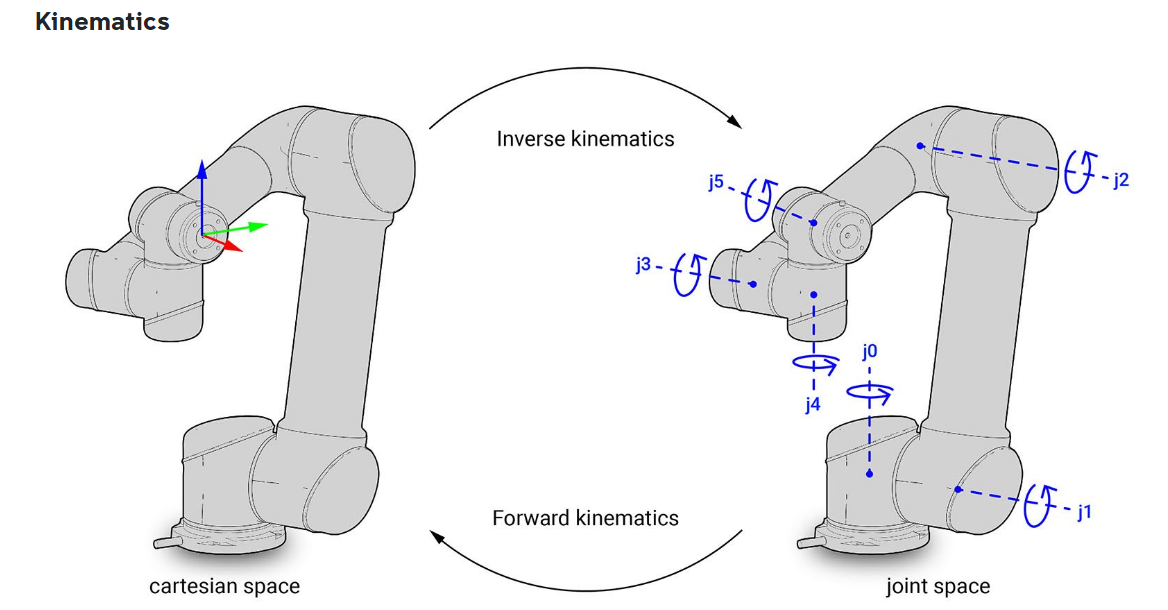
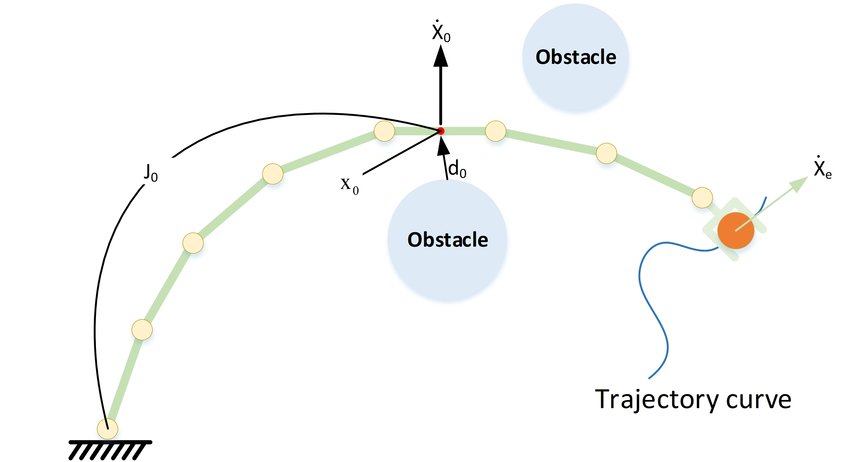
My experiences have shaped me to be a more well-rounded mechanical engineer. My time at Columbia University has given me the opportunity to collaborate with like-minded individuals who work on challenging projects. I have experience programming machine learning algorithms, state estimation, path planning, forward and inverse kinematics, and much more. I have designed individual variations of robots, from walking quadripeds to inch worms.
Resume
Portfolio
Here I have all of my projects that I have done that showcases all of my abilities.
- All
- Robotics
- Mechanical Design
- Hardware
- Programming


Skills
Contact
Address
Based in Manhattan
New York City, NY